Wiren Board 7.2: Низкоуровневая работа с железом
Это черновик страницы. Последняя правка сделана 21.05.2022 пользователем A.Degtyarev.
Введение
Эта статья предназначена, в первую очередь, для разработчиков стороннего ПО для контроллеров Wiren Board.
Самый простой и удобный способ работы с железом контроллера — через MQTT, связываясь с сервисами wb: wb-mqtt-gpio, wb-mqtt-adc, wb-mqtt-gpio и т.п. Сервисы wb- позволяют работать с железом через унифицированный интерфейс MQTT и скрывают аппаратные различия между аппаратными ревизиями контроллеров.
Работа в обход стандартных сервисов wb- обычно используется, когда программное обеспечение выполняется на разных Linux-контроллерах разных вендоров, и работа через соответсвующие интерфейсы ядра уже реализована в ПО. Данная статья содержит описание периферии, нужное для работы с ней через стандартные интерфейсы ядра. При работе с ядерными интерфейсами не забудьте отключить соответствующий сервис wb-.
Большая часть периферии, описанной в этой статье, описана также в ноде /wirenboard в Devicee Tree контроллера. Сервисы wb-mqtt-gpio, wb-mqtt-adc и т.д. берут описание периферии именно оттуда, считывая описание каждый раз при старте контроллера. Этот способ является предпочтительным и для стороннего ПО, чтобы сохранить совместимость с прошлыми и будущими аппаратными ревизиями оборудования.
Работа с GPIO в Linux
GPIO (General-purpose input/output — ввод/вывод общего назначения) — контакт электрической схемы, который может принимать одно из двух логических состояний — единицу или ноль. Пользователь может устанавливать и считывать состояние GPIO.
В разных устройствах высокий логический уровень может представляться разным напряжением — следите за этим. В контроллерах Wiren Board логическая единица — это 3.3 В.
ВНИМАНИЕ: не подключайте напрямую к GPIO контроллера сигналы с напряжением больше 3.3 В! Если нужно подключить устройство, которое выдает сигнал с более высоким напряжением — используйте схемы согласования. В некоторых случаях, если напряжение сигнала не больше 5 В, то можно согласовать сигналы через резистор на 20 кОм.
Подробно про работу с GPIO читайте в статье Работа с GPIO. Также рекомендуем прочитать соответствующий раздел документации к ядру Linux.
Для других версий контроллера смотрите Таблицы GPIO разных версий контроллера.
Посмотреть таблицу GPIO можно командой cat /sys/kernel/debug/gpio, или в разделе ниже.
GPIO на клеммниках
| Функция | GPIO number | Примечание | |
|---|---|---|---|
| Выходы A1-A3, D1 | |||
| A1 OUT | 109 | Выход «открытый коллектор» | |
| A2 OUT | 108 | Выход «открытый коллектор» | |
| A3 OUT | 107 | Выход «открытый коллектор» | |
| D1 OUT | 106 | Выход «открытый коллектор» | |
| Входы A1-A3, D1 (инвертированные, при отсутствии сигнала будет 1) | |||
| A1 IN | 231 | ||
| A2 IN | 230 | ||
| A3 IN | 227 | ||
| D1 IN | 228 | ||
| Onewire | |||
| W1 | 226 | 1-wire/DI | |
| W2 | 271 | 1-wire/DI | |
Реализация UART
| Название порта в Linux | Альтернативное имя порта в Linux | Разъём на контроллере | Примечание |
| /dev/ttymxc0 | /dev/ttyCONSOLE | Debug-uart контроллера (micro-usb) | Настройки по умолчанию: 115200-8-N-1 |
| /dev/ttymxc1 | /dev/ttyRS485-1 | Подписан RS-485, клеммники A и B | Неизолированный порт, установлен терминатор |
| /dev/ttymxc3 | /dev/ttyRS485-2 | Подписан RS-485, клеммники A/L и B/H (этот порт может использоваться и как CAN) | Неизолированный порт, установлен терминатор, мультиплексирован с CAN |
| /dev/ttymxc2 | /dev/ttyMOD1 | UART на модуле расширения MOD1 | |
| /dev/ttymxc4 | /dev/ttyMOD2 | UART на модуле расширения MOD2 | |
| /dev/ttymxc5 | /dev/ttyMOD3 | UART на модуле расширения MOD3 | |
| /dev/ttymxc6 | /dev/ttyMOD4 | UART на модуле расширения MOD4 | |
| /dev/ttymxc7 | /dev/ttyGSM | UART на модуле расширения WBC (разъём GSM/3G/4G-модема) | Для появления нужно выставить какой-либо из модемов в wb-hardware.conf |
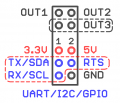
Распиновка разъемов Mod1, Mod2 и Mod3 на WB7 под модули расширения
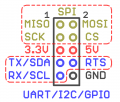
Распиновка разъема Mod4 на WB7 под модули расширения

Распиновка разъема WBC на WB7 под модули 2g/3g/4g модемов


