Протокол Modbus
Основные понятия
Modbus - это протокол, который служит для обмена данными между устройствами автоматизации и реализован в виде "протокола ответов на запросы (request-reply protocol)".
В устройствах Wiren Board данные Modbus передаются по последовательным линиям связи RS-485. В последовательных линиях связи протокол RS-485 полудуплексный и работает по принципу «клиент-сервер». Каждое устройство в сети (кроме ведущего см. далее) имеет адрес от 1 до 247, адрес 0 используется для широковещательной передачи данных всем устройствам, а адреса 248–255 считаются зарезервированными согласно спецификации Modbus, их использование не рекомендуется.
Существует две спецификации протокола: Modbus RTU и Modbus ASCII. В Modbus RTU передается 11-битный символ, состоящий из 1 стартового бита, 8 бит данных (начиная с младшего бита), бит четности (необязателен) и 2 стоповых бита - если бит четности не передается, или 1 стоповый бит - если бит четности передается. Такой символ передает 1 байт данных. В устройствах Wiren Board по умолчанию бит контроля четности не передается и используется 2 стоповых бита. В Modbus ASCII каждый байт передается двумя символами, представляющими ASCII-коды младшей и старшей четырехбитной группы байта (пример). Modbus RTU передает больше информации при той же скорости последовательной линии, и в устройствах Wiren Board используется именно он. Все дальнейшее описание относится к Modbus RTU.
Ведущее устройство ("мастер", или "клиент") периодически опрашивает "ведомое", или "сервер". Ведущее устройство не имеет адреса, передача сообщений от устройства-сервера ведущему без запроса ведущего в протоколе не предусмотрена.

Пакет данных Modbus выглядит, как это показано на рисунке. PDU (Protocol Data Unit) — общая часть пакета MODBUS, включающая код функции и данные пакета. ADU (Application Data Unit) — полный пакет MODBUS. Включает в себя специфичную для физического уровня часть пакета и PDU. Для последовательных линий в заголовке ADU передается адрес устройства, а в конце — контрольная сумма CRC16. Максимальный размер PDU в последовательных коммуникационных линиях составляет 253 байта (из максимальных, разрешенных спецификацией 256 байт вычитается 1 байт адреса и два байта контрольной суммы). Для справки — в Modbus TCP максимальная длина пакета составляет 260 байт.
Функция кодируется одним байтом и определяет, какое действие должно выполнить устройство-сервер. Значение кодов функций лежат в диапазоне от 1 до 255, причем коды от 128 до 255 зарезервированы для сообщений об ошибках со стороны устройства-сервера. Код 0 не используется. Размер блока данных может варьироваться от нуля до максимально допустимого. Если обработка запроса прошла без ошибок, то устройство-сервер возвращает пакет ADU, содержащий запрошенные данные.
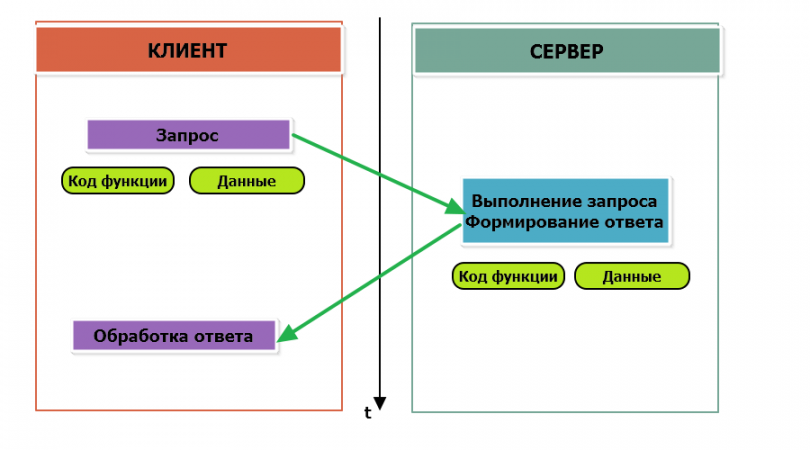
Modbus-транзакция, прошедшая без ошибок
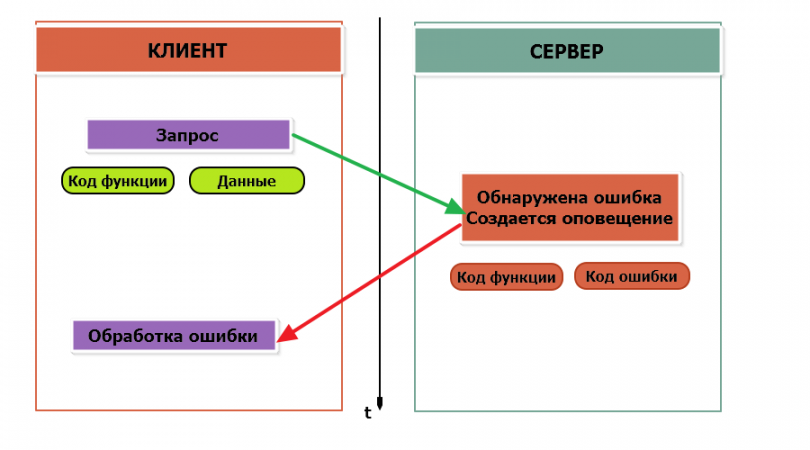
Modbus-транзакция с ошибками


При возникновении ошибки устройством возвращается код ошибки. При обычной транзакции код функции в ответе возвращается без изменений; при ошибке старший бит кода функции устанавливается в единицу (то есть код функции + 0x80). Так же есть таймаут ожидания ответа от ведомого устройства — бессмысленно долго ждать ответ, который, возможно, никогда и не придет.
Структуры данных Modbus
В Modbus принято кодировать адреса и данные в формате big-endian, то есть в формате, когда байты следуют, начиная со старшего: например, при передаче шестнадцатеричного числа 0x1234 сначала устройством будет принят байт 0x12, а затем — 0x34. Для передачи данных другого типа, например, чисел с плавающей запятой (float), текстовых строк, даты и времени суток и т.п. производитель может выбрать свой собственный способ кодирования — для расшифровки получаемых данных важно ознакомится со спецификацией производителя устройства.
Модель данных Modbus
Обмен данными с Modbus-устройствами происходит через регистры. В протоколе Modbus определяется четыре типа регистров, показанных в таблице:
| Таблица | Размер | Доступ |
|---|---|---|
| Регистры флагов (Coils) | 1 бит | чтение и запись |
| Дискретные входы (Discrete Inputs) | 1 бит | только чтение |
| Регистры хранения (Holding Registers) | 16-битное слово | чтение и запись |
| Регистры ввода (Input Registers) | 16-битное слово | только чтение |
Регистры флагов (Coils) хранят однобитные значения - то есть могут находится в состоянии 0 или 1. Такие регистры могут обозначать текущее состояние выхода (включено реле). Название "coil" буквально и означает обмотку-актюатор электромеханического реле. Регистры флагов допускают как чтение, так и запись.
Дискретные входы (Discrete Inputs) также являются однобитными регистрами, описывающими состояние входа устройства (например, подано напряжение — 1). Эти регистры поддерживают только чтение.
Регистры хранения (Holding Registers) и регистры ввода (Input Registers) представлены двухбайтовым словом и могут хранить значения от 0 до 65535 (0x0000 — 0xFFFF). Регистры ввода допускают только чтение (например, текущее значение температуры). Регистры хранения поддерживают как чтение, так и запись (для хранения настроек). В настоящее время во многих устройствах, в частности в устройствах Wiren Board, эти регистры не разделяются. Команды на чтение регистра хранения N и регистра ввода N обратятся к одному и тому же значению в адресном пространстве устройства.
Адреса регистров
Регистры в стандарте Modbus адресуются с помощью 16-битных адресов. Адресация начинается с нуля. Адрес регистра, таким образом, может принимать значения от 0 до 65535.
Адресные пространства регистров, также называемые таблицами или блоками, могут быть различны для всех четырёх типов регистров. Это значит, что значения регистров с одинаковым адресом, но разным типом, в общем случае разные.
Например, при чтении регистра флагов (coil) номер 42, регистра дискретного входа (Discrete), регистров ввода и хранения (Input и Holding) с теми же адресами, можно получить четыре разных значения.
Нестандартная адресация
В документации на некоторые, особенно старые, устройства адреса элементов (регистров) указываются в формате, не соответствующем стандарту. В этом формате тип элемента кодируется первой цифрой адреса, а адресация начинается не с нуля.
Например, регистр хранения с адресом 0 может записываться как 40001 или 400001, а Coil с адресом 0 как 000001.
В таблице перевода адресов в стандартный формат показаны диапазоны для двух разных нестандартных типов указания адресов и соответствующие им типы данных и диапазоны стандартных адресов.
| Тип данных | Стандартные адреса | Стандартные адреса (hex) | Нестандартные адреса (5 цифр) | Нестандартные адреса (6 цифр) |
|---|---|---|---|---|
| Флагов (Coils) | 0-65535 | 0x0000 - 0xFFFF | 00001 - 09999 | 000001 - 065536 |
| Дискретных входов (Discrete) | 0-65535 | 0x0000 - 0xFFFF | 10001 - 19999 | 100001 - 165536 |
| Регистры входов (Input Registers) | 0-65535 | 0x0000 - 0xFFFF | 30001 - 39999 | 300001 - 365536 |
| Регистры хранения (Holding Registers) | 0-65535 | 0x0000 - 0xFFFF | 40001 - 49999 | 400001 - 465536 |
Признаки использования нестандартной адресации:
- Адреса записываются в десятичном формате
- Во всех адресах пять или шесть цифр
- Адреса с недискретными данными (показания датчиков и т.п.) начинаются на 30 или 40
Часто рядом с нестандартными адресами указываются и адреса соответствующие стандарту, обычно в шестнадцатеричном формате. Стоит отметить, что физически в пакете данных передаются адреса в стандартном формате, независимо от способа представления их в документации.
Пример описания регистров в документации
В готовых шаблонах устройств для контроллера Wiren Board есть шаблон для однофазного счетчика электроэнергии SDM220 (/usr/share/wb-mqtt-serial/templates/config-sdm220.json). В документации от производителя "Eastron SDM 220 Modbus Smart Meter Modbus Protocol Implementation V1.0" перечислены регистры и соответствующие им измеряемые параметры, например:
| Address (Register) | Description | Units | Modbus Protocol Start Address Hex (Hi Byte Lo Byte) |
|---|---|---|---|
| 30001 | Line to neutral volts. | Volts | 00 00 |
| 30007 | Current. | Amps. | 00 06 |
| 30013 | Active power | Whatts | 00 0C |
| 30019 | Apparent power | VoltAmps | 00 12 |
| ... | ... | ... | ... ... |
Производитель в таблице приводит и логические, и физические адреса регистров, что позволяет нам с легкостью создать шаблон устройства и проиллюстрировать связь между логическими и физическими адресами Modbus-регистров.

Коды функций чтения и записи регистров
В следующей таблице приведены наиболее распространенные коды функций Modbus:
| Код функции | HEX | Название | Действие |
|---|---|---|---|
| 1 | 0x01 | Read Coils | Чтение значений нескольких регистров флагов |
| 2 | 0x02 | Read Discrete Inputs | Чтение значений нескольких дискретных входов |
| 3 | 0x03 | Read Holding Registers | Чтение значений нескольких регистров хранения |
| 4 | 0x04 | Read Input Registers | Чтение значений нескольких регистров ввода |
| 5 | 0x05 | Write Single Coil | Запись одного регистра флагов |
| 6 | 0x06 | Write Single Register | Запись одного регистра хранения |
| 15 | 0x0F | Write Multiple Coils | Запись нескольких регистров флагов |
| 16 | 0x10 | Write Multiple Register | Запись нескольких регистров хранения |
Команды условно можно разделить по типам: чтение значений — запись значений; операция с одним значением — операция с несколькими значениями.
Формат данных запросов и ответов Modbus
Рассмотрим подробнее, как происходит обмен данными между устройством-клиентом, отправляющим запрос, и устройством-сервером, отвечающим ему. На следующем рисунке показан обмен данными контроллера с устройством с адресом 0x01. Мы хотим прочесть 8 coil-регистров, начиная с первого.

В качестве данных мы получили шестнадцатеричное число 0x2D, то есть состояние восьми coil-регистров в двоичном виде такое: 0b10110100.
В следующей таблице приведены структуры данных запросов и ответов для основных функций Modbus.
| Код функции | Запрос | Ответ |
|---|---|---|
| 1 (Read Coils) и 2 (Read Discrete Inputs) |
|
|
| 3 (Read Holding Registers) и 4 (Read Input Registers) |
|
|
| 5 (Write Single Coil) |
|
Ответ аналогичен запросу |
| 6 (WriteSingle Register) |
|
Ответ аналогичен запросу |
| 15 (WriteMultipleCoils) |
|
|
| 16 (Write Multiple register ) |
|
|
Коды исключений (ошибки) Modbus
Если запрос не может по той или иной причине быть обработан устройством-сервером, то в ответ он отправляет сообщение об ошибке. Соообщение об ошибке содержит адрес Modbus-устройства, код функции, при выполнении которой произошла ошибка, увеличенный на 0x80, код ошибки и контрольную сумму:

{kind=link}
{kind=link}
{kind=link}
{kind=link}
В этом случае мы попытались обратиться к несуществующему адресу регистра 0xFFFF и попытались прочесть 8 регистров флагов. В результате мы получили код ошибки 0x03 — "В поле данных передано неверное значение".
Наиболее распространенные коды ошибок Modbus приведены в следующей таблице:
| Код ошибки | Название ошибки | Что означает |
|---|---|---|
| 1 | Illegal Function | В запросе был передан недопустимый код функции |
| 2 | Illegal Data Address | Указанный в запросе адрес не существует |
| 3 | Illegal Data Value | Неверный формат запроса, например количество байт в запросе не соответствует ожидаемому.
Примечание: несмотря на название, эта ошибка не говорит о том, что само значение регистра неправильное или ошибочное, и должна использоваться только для ошибок формата запроса. |
| 4 | Server Device Failure | Произошла невосстановимая ошибка на устройстве при выполнении запрошенной операции |
| 5 | Acknowledge | Запрос принят, выполняется, но выполнение потребует много времени; необходимо увеличить таймаут. |
| 6 | Server Device Busy | Устройство занято обработкой предыдущего запроса. |
| 7 | Negative Acknowledge | Устройство не может выполнить запрос, необходимо получить от устройства дополнительную диагностическую информацию. Возможно, требуется тех. обслуживание. |
| 8 | Memory Parity Error | Ошибка четности при обращении к внутренней памяти устройства. |
Вычисление контрольной суммы Modbus
Для протокола Modbus RTU 16-битная контрольная сумма (CRC) вычисляется по алгоритму, описанному в спецификации Modbus, в документе "Modbus Serial Line Protocol and Implementation Guide", раздел "CRC-generation". Передающее устройство формирует два байта контрольной суммы на основе данных сообщения, а принимающее устройство заново вычисляет контрольную сумму и сравнивает с полученной. Совпадение принятой и вычисленной контрольной суммы Modbus RTU считается индикатором успешного обмена данными.
В случае ограниченных вычислительных ресурсов для вычисления контрольной суммы существует функция, использующая табличные значения (также приведена в спецификации).
Расширение протокола Modbus от Wiren Board
Мы производим устройства, которые работают по стандартному протоколу Modbus RTU. Но протокол очень старый и имеет ряд недостатков, которые мы решили устранить.
Мы добавили к стандартному протоколу новые функции: настраиваемое время задержки, игнорирование стопбитов и режим сплошного чтения регистров.
Также выпустили расширение протокола под названием «Быстрый Modbus». В нем появились события и быстрое сканирование устройств на шине RS-485.
Ниже описаны новые функции, а про расширение «Быстрый Modbus» читайте на странице с описанием.
Всё описываемое справедливо только для Modbus-устройств Wiren Board.
Настраиваемое время задержки ответа устройством
Устройства работают по стандарту, поэтому отвечают master-устройству через 3.5 символа после конца кадра запроса.
Но некоторые сторонние master-устройства могут не соблюдать стандарт и после отправки запроса продолжают удерживать приемопередатчик в режиме отправки некоторое время.
В устройствах есть специальный регистр 113, в котором можно настроить время ответа slave-устройства в миллисекундах. Нужное значение подбирается опытным путём.
Игнорирование стопбитов
Устройства всегда ожидают от мастера 1 стопбит, а отправляют ответ с 2.
Благодаря этому невозможно неправильно настроить стопбиты в master- и в slave-устройстве. Передача ответов более надежная даже, если мастер ожидает 1 стопбит. В последних прошивках настройка стопбита в регистре 112 игнорируется.
Режим сплошного чтения регистров
Часто на устройствах регистры расположены с зазором, который не позволяет читать все необходимые регистры подряд одной командой.
Мы добавили режим сплошного чтения, который активируется записью 1 в регистр 114. При активации можно запрашивать любой регион, который укладывается по длине в ограничения команды чтения.
При таком запросе устройство вернёт пакет со значением регистров. Если регистры отсутствуют в устройстве, то для них будет возвращено значение 0xFFFE.