WBIO-DO-R10R-4 Relay Module For Roller Shutter: различия между версиями
Sergey (обсуждение | вклад) (внесена партия v1.5D) |
|||
| (не показано 18 промежуточных версий 7 участников) | |||
| Строка 27: | Строка 27: | ||
|- | |- | ||
|Конфигурация контактов | |Конфигурация контактов | ||
| | |SPCO/SPTT (см. схему) | ||
состояния группы выходов: | |||
<!--T:9--> | |||
* выкл., | |||
<!--T:10--> | |||
* замкнут Lx и NC, | |||
<!--T:11--> | |||
* замкнут Lx и NO | |||
|- | |- | ||
|Максимальное коммутируемое напряжение, AC | |Максимальное коммутируемое напряжение, AC | ||
| Строка 36: | Строка 45: | ||
|30 В | |30 В | ||
|- | |- | ||
|Максимальный коммутируемый ток, на каждый канал | |Максимальный коммутируемый ток, на каждый канал (*) | ||
|3 А | |||
| | |||
|- | |- | ||
|Сопротивление канала в открытом состоянии | |||
|Сопротивление канала в | |||
|< 100 mOhm | |< 100 mOhm | ||
|- | |- | ||
| Строка 67: | Строка 71: | ||
{{Wbincludes:Weight}} 165 г. | {{Wbincludes:Weight}} 165 г. | ||
|} | |} | ||
<nowiki>*</nowiki>) Максимальный коммутируемый ток указан для резистивной нагрузки и напряжения 230 V AC. | |||
==Общий принцип работы== | ==Общий принцип работы== | ||
Содержит 4 группы реле. Каждая группа имеет три возможных состояния и представлена в виде контролов ''*_ON'' — включение и отключение двигателя и ''*_DIR'' — смена направления. | Содержит 4 группы реле. Каждая группа имеет три возможных состояния и представлена в виде контролов ''*_ON'' — включение и отключение двигателя и ''*_DIR'' — смена направления. | ||
Чтобы реле не сломалось, всегда меняйте направление вращения привода по алгоритму: | |||
# снимите напряжение с привода выключением контрола '''*_ON'''; | |||
# переключите направление с помощью контрола '''*_DIR'''; | |||
# не раньше, чем через 20 мс подайте напряжение на привод, включив контрол '''*_ON'''. | |||
Внешний вид контролов и их представление в [[MQTT]] смотрите в разделе [[#Настройка подключения к контроллеру|Настройка подключения к контроллеру]]. | |||
[[ | |||
# | |||
== Монтаж == | == Монтаж == | ||
| Строка 92: | Строка 87: | ||
=== Выходы модуля — подключение нагрузки=== <!--T:17--> | === Выходы модуля — подключение нагрузки=== <!--T:17--> | ||
<!--T:18--> | |||
Фазный провод подключается к клеммам Lx. Обе клеммы группы контактов Lx соединены на плате. Клеммы NC и NO подключаются к двигателю, задавая направление вращения. Выходы NO и NC защищены варисторами до партии 1.3A. | |||
<!--T:19--> | <!--T:19--> | ||
[[Файл:Roll.png|400px|thumb|none|Схема подключения электродвигателя к модулю WBIO-DO-R10R-4]] | [[Файл:Roll.png|400px|thumb|none|Схема подключения электродвигателя к модулю WBIO-DO-R10R-4]] | ||
== Настройка подключения к контроллеру == <!--T:15--> | == Настройка подключения к контроллеру == <!--T:15--> | ||
| Строка 114: | Строка 109: | ||
== Ревизии устройства == | == Ревизии устройства == | ||
{{Wbincludes:Revision}} | {{Wbincludes:Revision}} | ||
|- | |- | ||
|1.5 | |1.5 | ||
|v1.5A, v1.5B, v1.5C, v1.5D | |v1.5A, v1.5B, v1.5C, v1.5D - ... | ||
|08.2022 - | |08.2022 - ... | ||
| | | | ||
* | *незначительные изменения платы | ||
|- | |- | ||
|1.3, 1.4 | |1.3, 1.4 | ||
|v1.3B/b, v1.3C, v1.3D, v1.4A - v1.4C | |v1.3B/b, v1.3C, v1.3D, v1.4A - v1.4C | ||
| | |07.2020 - 05.2022 | ||
| | | | ||
* | *разъемные клеммники, без варисторов | ||
|- | |- | ||
|1.2 | |1.2 - 1.3 | ||
|1.2B - 1.2C | |1.2B - 1.2C, 1.3A | ||
|2019 - | |2019 - 06.2020 | ||
| | | | ||
* | *разъемные клеммники, защита на варисторах | ||
|- | |- | ||
|1.0 | |1.0 | ||
|134, 243 | |134, 243 | ||
|лето 2016 - 2018 | |лето 2016 - 2018 | ||
| | | | ||
* | *первые версии: винтовые клеммники, защита на варисторах | ||
|- | |- | ||
|} | |} | ||
| Строка 169: | Строка 141: | ||
{{Wbincludes:CDR lib}} | {{Wbincludes:CDR lib}} | ||
''' | '''Corel Draw PDF:''' [[File:WBIO-DO-R10R-4.cdr.pdf]] | ||
'''Autocad 2013 DXF:''' [[File:WBIO-DO-R10R-4.dxf.zip]] | '''Autocad 2013 DXF:''' [[File:WBIO-DO-R10R-4.dxf.zip]] | ||
'''Autocad PDF:''' [[File:WBIO-DO-R10R-4.pdf]] | '''Autocad PDF:''' [[File:WBIO-DO-R10R-4.pdf]] | ||
Версия 17:17, 26 января 2023

Назначение
Управление электроприводом штор, роллет, запорных кранов.
Технические характеристики
| Параметр | Значение |
|---|---|
| Количество групп выходов | 4 |
| Тип выходов | механическое реле |
| Конфигурация контактов | SPCO/SPTT (см. схему)
состояния группы выходов:
|
| Максимальное коммутируемое напряжение, AC | 250 В |
| Максимальное коммутируемое напряжение, DC | 30 В |
| Максимальный коммутируемый ток, на каждый канал (*) | 3 А |
| Сопротивление канала в открытом состоянии | < 100 mOhm |
| Напряжение изоляции между контроллером и выходом | 1500 В (среднеквадратич.) |
| Срок жизни: количество переключений
для нагрузки 10 A 230 В переменного тока, cos φ = 1 |
100 000 |
| Тип модуля | "O" (non-inverted address scheme) |
| Максимальная потребляемая мощность | 1.15 Вт (2.5 Вт пиковое) |
| Условия эксплуатации | |
| Температура воздуха | От −40 до +80 °С |
| Относительная влажность | До 95 %, без конденсации влаги |
| Климатическое исполнение по ГОСТ 15150-69 | O2.1* |
| Гарантийный срок | 2 года |
| Срок службы | 5 лет |
| Клеммники и сечение проводов | |
| Рекомендуемое сечение провода с НШВИ | 0.5-2.5 мм2 |
| Длина стандартной втулки НШВИ | 8 мм |
| Момент затяжки винтов | 0,5 Н∙м |
| Габариты | |
| Ширина, DIN-юнитов | 3 |
| Габаритные размеры (Д x Ш x В) | 53 x 90 x 58 мм |
| Масса (с коробкой) | 165 г. |
*) Максимальный коммутируемый ток указан для резистивной нагрузки и напряжения 230 V AC.
Общий принцип работы
Содержит 4 группы реле. Каждая группа имеет три возможных состояния и представлена в виде контролов *_ON — включение и отключение двигателя и *_DIR — смена направления.
Чтобы реле не сломалось, всегда меняйте направление вращения привода по алгоритму:
- снимите напряжение с привода выключением контрола *_ON;
- переключите направление с помощью контрола *_DIR;
- не раньше, чем через 20 мс подайте напряжение на привод, включив контрол *_ON.
Внешний вид контролов и их представление в MQTT смотрите в разделе Настройка подключения к контроллеру.
Монтаж

Модули ввода-вывода стыкуются к контроллеру Wiren Board или преобразователю интерфейсов WB-MIO справа, через боковой разъём. Следите за попаданием всех штырей модуля в отверстия ответного разъёма. Зафиксируйте на DIN-рейке упорами (ограничителями) с боков, но оставьте еще ~2см свободного места для возможности быстрого демонтажа.
Последовательно можно подключать до 8 штук: до 4 модулей ввода (типа «I») и до 4-х модулей вывода (тип «O»). Исключение WBIO-AI-DV-12 — этот модуль можно подключить только один.
Адреса раздаются последовательно. Подключать до 4 модулей можно в любой последовательности, а при большем числе следует подключать сначала один тип, потом другой.
Выходы модуля — подключение нагрузки
Фазный провод подключается к клеммам Lx. Обе клеммы группы контактов Lx соединены на плате. Клеммы NC и NO подключаются к двигателю, задавая направление вращения. Выходы NO и NC защищены варисторами до партии 1.3A.

Настройка подключения к контроллеру
Общая информация
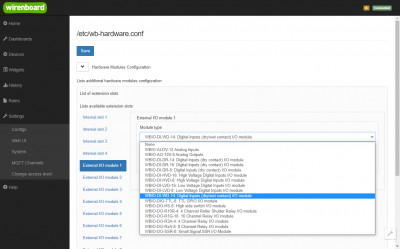
После физического подключения модуля его нужно добавить в конфигурацию контроллера:
- В веб-интерфейсе перейдите в раздел Настройки → Конфигурационные файлы.
- Зайдите в раздел Модули расширения и порты, выберите из Модуль WBIO (External I/O module) тот, куда установлен боковой модуль WBIO.
- В раскрывающемся списке Тип модуля выберите тип установленного модуля.
- Нажмите кнопку Записать.
Для удаления модуля выберите тип Не установлен.
Убедитесь, что внешний модуль виден в веб-интерфейсе:
- Перейдите в раздел Устройства.
- Найдите устройство Relays & FETs (Discrete I/O в контроллерах Wiren Board 6 и старее) для дискретных и ADCs для аналоговых модулей. Каналы будут иметь вид EXTN_YYYY, где N — порядковый номер модуля, а YYY — название канала модуля.
Адрес MQTT-топика будет иметь вид /devices/wb-gpio/controls/EXTN_YYYY.
Настройка бокового нового модуля
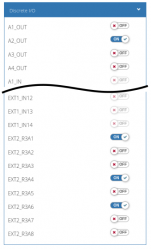
Каналы внешнего модуля в веб-интерфейсе контроллера Wiren Board


Особенности этого модуля

В устройстве Discrete I/O после подключения модуля создадутся контролы:
- EXT(1-8)_DIR(1-4) — выбор направления вращения двигателя, на схеме выше это ключ R2.
- EXT(1-8)_ON(1-4) — включение и выключения двигателя, на схеме ключ R1.
Название контролов в MQTT:
- /devices/wb-gpio/controls/EXTx_DIRy
- /devices/wb-gpio/controls/EXTx_ONy.
Ревизии устройства
Номер партии (Batch №) указан на наклейке на боковой поверхности корпуса или на печатной плате.
| Ревизия | Партии | Дата выпуска | Отличия от предыдущей ревизии |
|---|---|---|---|
| 1.5 | v1.5A, v1.5B, v1.5C, v1.5D - ... | 08.2022 - ... |
|
| 1.3, 1.4 | v1.3B/b, v1.3C, v1.3D, v1.4A - v1.4C | 07.2020 - 05.2022 |
|
| 1.2 - 1.3 | 1.2B - 1.2C, 1.3A | 2019 - 06.2020 |
|
| 1.0 | 134, 243 | лето 2016 - 2018 |
|
Изображения и чертежи устройства

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Corel Draw 2018 (шрифт — Ubuntu): Файл:WB-Library.cdr.zip
Visio:
- Устройства Wiren Board: Файл:WB-Visio-Lib.cdr.zip.
- Щиты, автоматы, контакторы и прочее от стороннего разработчика.
Corel Draw PDF: Файл:WBIO-DO-R10R-4.cdr.pdf
Autocad 2013 DXF: Файл:WBIO-DO-R10R-4.dxf.zip
Autocad PDF: Файл:WBIO-DO-R10R-4.pdf