CAN: различия между версиями
м (Исправлена ссылка в конце статьи) |
Vdromanov (обсуждение | вклад) |
||
| (не показано 8 промежуточных версий 4 участников) | |||
| Строка 1: | Строка 1: | ||
<languages/><translate> | <languages/> | ||
<translate> | |||
<!--T:1--> | |||
Работа происходит через стандартную подсистему Linux | Работа происходит через стандартную подсистему Linux SocketCAN. Порты CAN доступны в системе как сетевые интерфейсы can0 или can1, в зависимости от модели контроллера. Для работы CAN на контроллерах до версии 6.7.x нужен джампер терминатора на порту. Начиная с версий 6.7.x, терминатор управляется программно и включается автоматически. | ||
== Настройка == <!--T: | == Настройка ==<!--T:3--> | ||
=== | <gallery widths=400px heights=400px mode="packed"> | ||
Image:Can iface.png|Настройка can-интерфейса. Allow-hotplug позволяет интерфейсу подниматься автоматически. | |||
Image:Can enable.png|Перевод порта RS485-2 в режим CAN и включение драйвера can в linux. | |||
</gallery> | |||
<!--T: | ==== Через web-интерфейс ====<!--T:4--> | ||
Для настройки через web-интерфейс нужно обновить пакет wb-mqtt-confed до версии 1.2.3+ | |||
Действия происходят в разделе Configs web-интерфейса: | |||
# На вкладке Network Interfaces добавьте новый интерфейс can0 (см. скриншот). Нажмите кнопку Save. | |||
# Переключите порт RS-485/CAN в режим CAN: На вкладке Hardware Modules Configuration выберите настройки RS485-2/CAN interface config, выберите Module type '''CAN interface''' и нажмите кнопку Save. | |||
<!--T:5--> | |||
CAN-интерфейс будет подниматься сам при: | CAN-интерфейс будет подниматься сам при: | ||
* | * Загрузке системы (сервис wb-hwconf-manager). | ||
* | * Выставлении порта RS-485/2 в режим CAN. | ||
==== Стандартными средствами linux (автоматически) ====<!--T:6--> | |||
Раздел Network Interfaces web-интерфейса - это обёртка вокруг файла /etc/network/interfaces => настройку CAN можно произвести с помощью службы управления сетями debian. Для этого нужно: | |||
Раздел | # Добавить в /etc/network/interfaces запись вида:<syntaxhighlight lang="bash"> | ||
# Добавить в | |||
allow-hotplug can0 | allow-hotplug can0 | ||
iface can0 can static | iface can0 can static | ||
bitrate 125000 | bitrate 125000 | ||
</syntaxhighlight> | </syntaxhighlight> | ||
# Переключить порт RS-485-2 в режим CAN | # Переключить порт RS-485-2 в режим CAN | ||
Получим результат, аналогичный настройке через | Получим результат, аналогичный настройке через web-интерфейс. | ||
=== Стандартными средствами linux (вручную) === <!--T: | ==== Стандартными средствами linux (вручную) ====<!--T:7--> | ||
После переключения порта в режим CAN, нужно выполнить: | После переключения порта в режим CAN, нужно выполнить: | ||
< | <pre> | ||
ip link set can0 up type can bitrate 125000 | ip link set can0 up type can bitrate 125000 | ||
</ | </pre> | ||
== Работа с CAN ==<!--T:8--> | |||
<!--T:2--> | |||
Утилиты cansend и candump присутствуют в стандартном наборе ПО контроллера. Если по каким-то причинам их нет, можно поставить пакет can-utils: | |||
<pre> | |||
apt update; apt install can-utils | |||
</pre> | |||
<!--T: | <!--T:9--> | ||
отправка 4 байтов c адресом 123: | |||
<!--T: | <!--T:10--> | ||
<pre> | |||
cansend can0 123#DEADBEEF | cansend can0 123#DEADBEEF | ||
</ | </pre> | ||
<!--T:11--> | |||
показывать входящие пакеты: | |||
<!--T: | <!--T:12--> | ||
<pre> | |||
candump can0 | candump can0 | ||
</ | </pre> | ||
<!--T:13--> | |||
показать статистику: | |||
<!--T: | <!--T:14--> | ||
<pre> | |||
cat /proc/net/can/stats | cat /proc/net/can/stats | ||
</ | </pre> | ||
<!--T: | <!--T:15--> | ||
Обратите внимание, что в случае проблем на шине (нет терминатора, нет принимающего устройства, короткое замыкание), контроллер может прекратить работу. | Обратите внимание, что в случае проблем на шине (нет терминатора, нет принимающего устройства, короткое замыкание), контроллер может прекратить работу. | ||
Для того чтобы начать работу вновь, выполните: | Для того, чтобы начать работу вновь, выполните | ||
< | |||
<!--T:16--> | |||
<pre> | |||
ifconfig can0 down && ip link set can0 up type can bitrate 125000 | ifconfig can0 down && ip link set can0 up type can bitrate 125000 | ||
</ | </pre> | ||
<!--T: | <!--T:17--> | ||
Больше информации смотрите в | Больше информации смотрите в [http://www.armadeus.com/wiki/index.php?title=CAN_bus_Linux_driver статье]. | ||
</translate> | </translate> | ||
Версия 13:29, 11 декабря 2020
Работа происходит через стандартную подсистему Linux SocketCAN. Порты CAN доступны в системе как сетевые интерфейсы can0 или can1, в зависимости от модели контроллера. Для работы CAN на контроллерах до версии 6.7.x нужен джампер терминатора на порту. Начиная с версий 6.7.x, терминатор управляется программно и включается автоматически.
Настройка
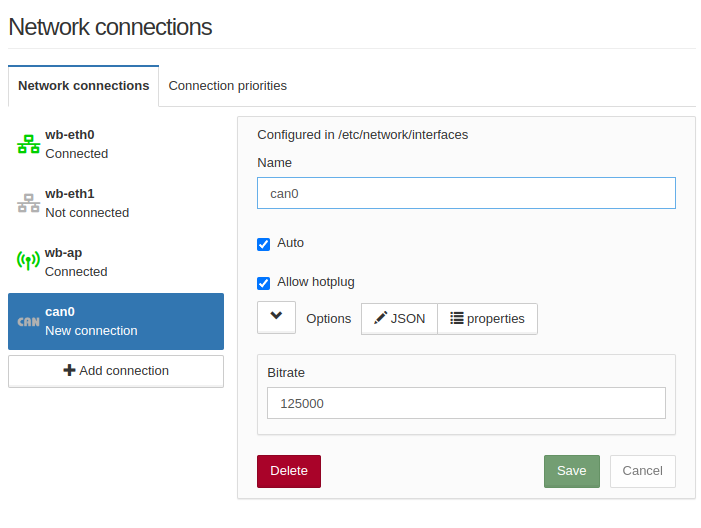
Настройка can-интерфейса. Allow-hotplug позволяет интерфейсу подниматься автоматически.
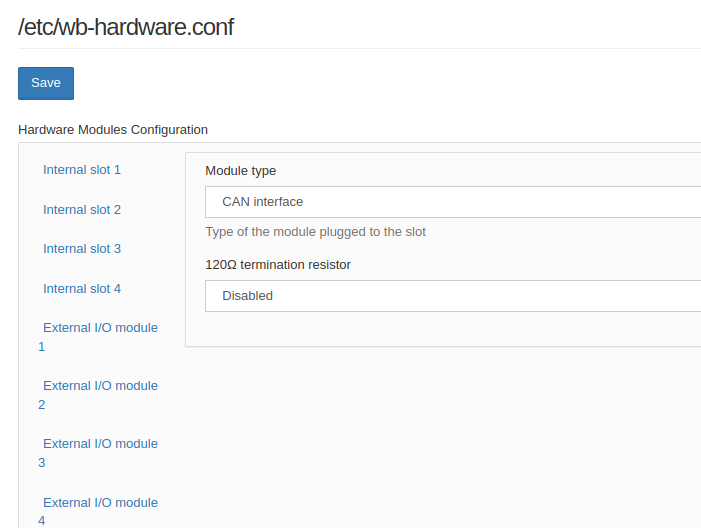
Перевод порта RS485-2 в режим CAN и включение драйвера can в linux.


Через web-интерфейс
Для настройки через web-интерфейс нужно обновить пакет wb-mqtt-confed до версии 1.2.3+
Действия происходят в разделе Configs web-интерфейса:
- На вкладке Network Interfaces добавьте новый интерфейс can0 (см. скриншот). Нажмите кнопку Save.
- Переключите порт RS-485/CAN в режим CAN: На вкладке Hardware Modules Configuration выберите настройки RS485-2/CAN interface config, выберите Module type CAN interface и нажмите кнопку Save.
CAN-интерфейс будет подниматься сам при:
- Загрузке системы (сервис wb-hwconf-manager).
- Выставлении порта RS-485/2 в режим CAN.
Стандартными средствами linux (автоматически)
Раздел Network Interfaces web-интерфейса - это обёртка вокруг файла /etc/network/interfaces => настройку CAN можно произвести с помощью службы управления сетями debian. Для этого нужно:
- Добавить в /etc/network/interfaces запись вида:
allow-hotplug can0 iface can0 can static bitrate 125000 - Переключить порт RS-485-2 в режим CAN
Получим результат, аналогичный настройке через web-интерфейс.
Стандартными средствами linux (вручную)
После переключения порта в режим CAN, нужно выполнить:
ip link set can0 up type can bitrate 125000
Работа с CAN
Утилиты cansend и candump присутствуют в стандартном наборе ПО контроллера. Если по каким-то причинам их нет, можно поставить пакет can-utils:
apt update; apt install can-utils
отправка 4 байтов c адресом 123:
cansend can0 123#DEADBEEF
показывать входящие пакеты:
candump can0
показать статистику:
cat /proc/net/can/stats
Обратите внимание, что в случае проблем на шине (нет терминатора, нет принимающего устройства, короткое замыкание), контроллер может прекратить работу.
Для того, чтобы начать работу вновь, выполните
ifconfig can0 down && ip link set can0 up type can bitrate 125000
Больше информации смотрите в статье.